




Сергей, это реально сложно. посмотрите на попытки Романа чего-то ваять на OpenWRT или ДНК с его прошивками роутера.
Вы же не винды ваяете. Задача предельно упростить систему, чтобы она была простой и функциональной. Юникс ее усложняет.
Если хотите OS посмотрите на RTOS. Как мне кажется на них будет проще и надежнее.
Борис, мне собственно все равно какая операционка  Все отличие для меня, как программиста, какой компилятор проекта задать - Винда или Юникс.
Все отличие для меня, как программиста, какой компилятор проекта задать - Винда или Юникс.
Можно даже одну и ту-же программу компилировать для разных операционок, а можно сделать кросс-платформенное приложение (правда оно будет потяжелее, т. к. не будут использоваться внешние библиотеки).
Ну не буду говорить, что делать проект на Delphi гораздо удобнее и приятнее, чем писать код - GUI есть GUI.
Опять же что значит упростить систему .... ?
Можно написать на ассемблере под конкретный процессор. Будет сверхлегкая программа, но писать будешь несколько лет.
Можно написать на С++ в коде, будет чуть тяжелее, но и быстрее - год.
Можно на Delphi под операционку. Будет весить несколько метров, но сделать можно за пару месяцев.
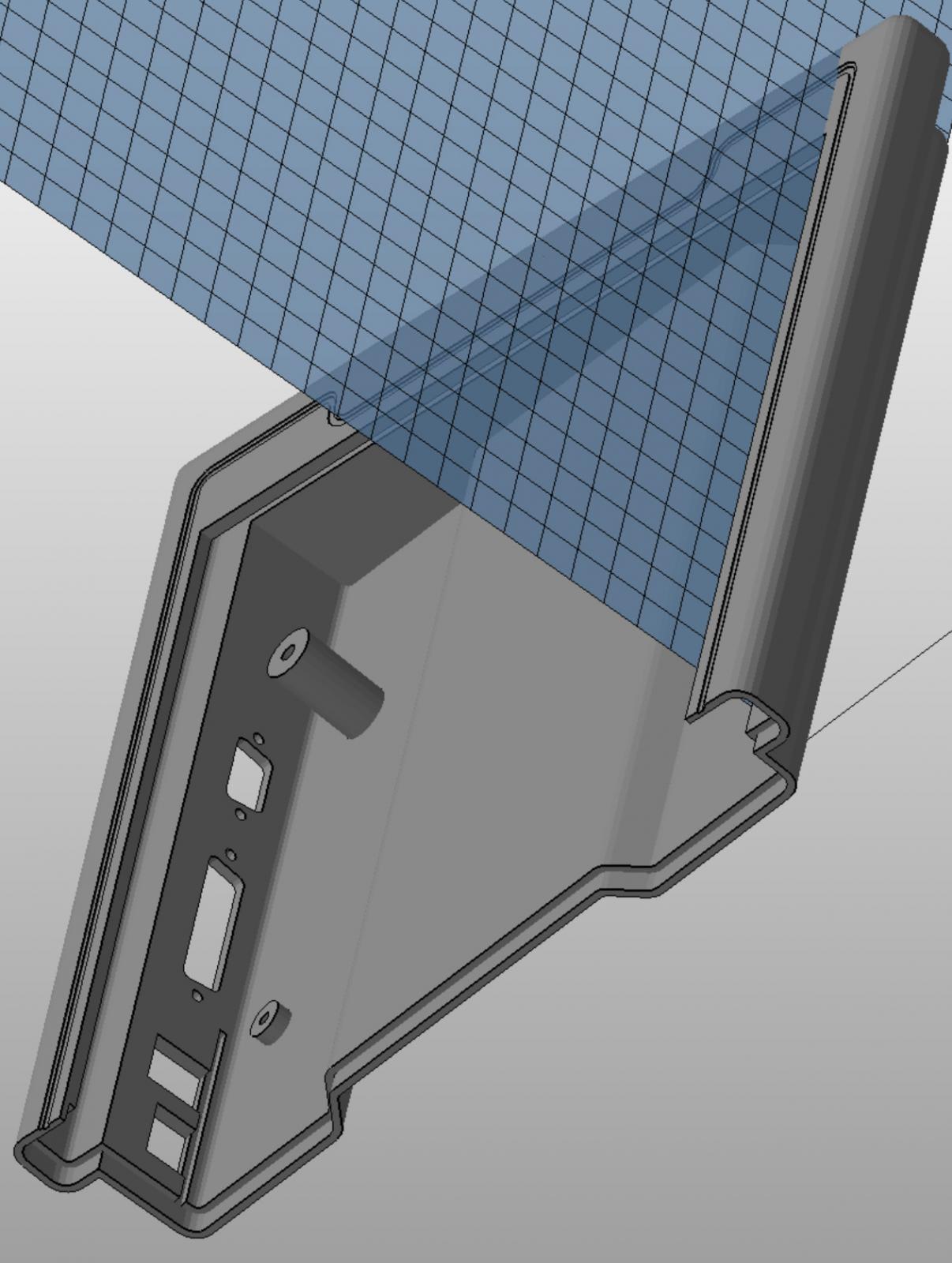
Учитывая, что я собираюсь использовать Raspberry, то программа в несколько метров (или гиг) это ... ничего.
Скорость работы при этом будет тоже чуть ниже, но, как я и писал выше, назовите мне аквариумную задачу с необходимой скоростью реакции в 1 мкс
Собственно датчики нужно опрашивать раз в 5-10 секунд.
Более того, скажу, что общее быстродействие системы будет ограничено не операционкой и программой, а скоростью шины (которой тем не менее для наших нужд более чем достаточно).
Зато я получаю универсальность и функциональность программы, т. к. операционка УЖЕ поддерживает и файловую систему, и USB, и LAN, и Wi-Fi.