




Исходники и всё для самостоятельной сборки.
Также в проекте настроены регулярные автоматические сборки
- Инструкция[ENG] по сборке одиночной помпы с 3D печатным корпусом
- Инструкция по сборке дозера с 3 помпами и стендом(опционально) для реагентов
- MQTT команды и статистика
Код написан на MicroPython + мощной и быстрой нативной библиотеке Ulab/Numpy для вычислений
Тема на reef2reef где вероятней будут чаше публиковаться апдейты
Описание:
Целью этого проекта является создание высокоточного и стабильного самостоятельного решения для дозирующих насосов с удобным интерфейсом и широкими возможностями интеграции с IoT
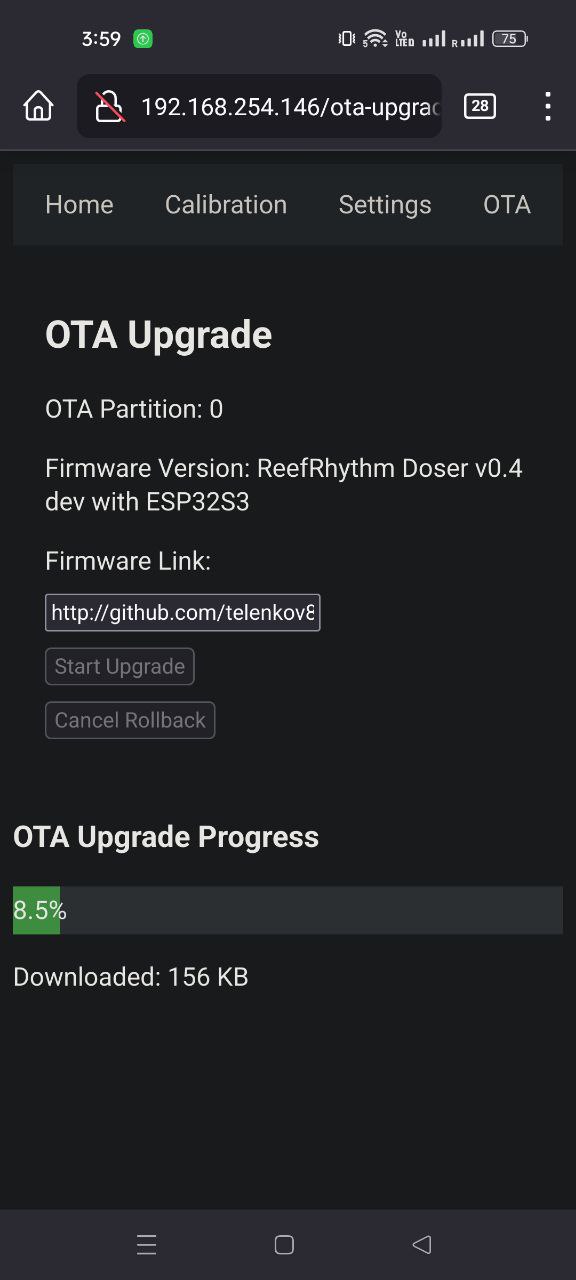
Он предназначен для автоматизации и упрощения процесса дозирования, обеспечивая точное и последовательное дозирование без ручных вычислений. Используя передовые драйверы шаговых двигателей с управлением G-кодом и библиотеку Ulab для высокопроизводительных вычислений, этот проект предлагает передовое решение для аквариумистов и любителей. Кроме того, он имеет встроенную функцию OTA для плавного обновления прошивки, гарантируя, что система всегда получать последние обновления и улучшения.
TTX:
1)Работа в постоянном режиме 24/7/365
2)Минимальная скорость дозировани от 0.1мл/мин
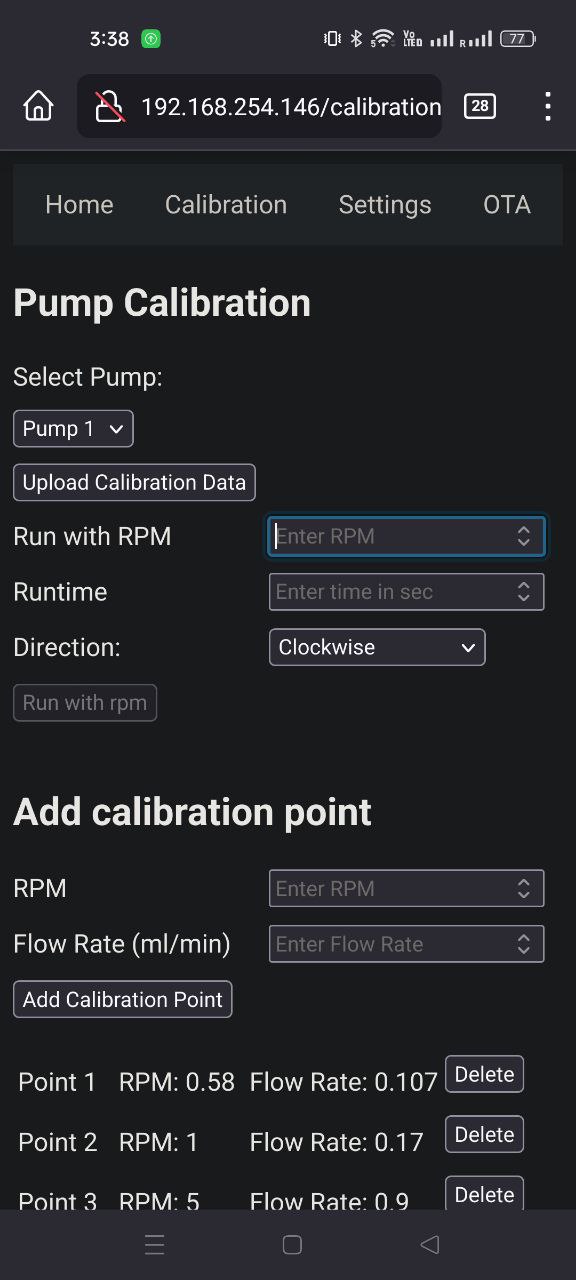
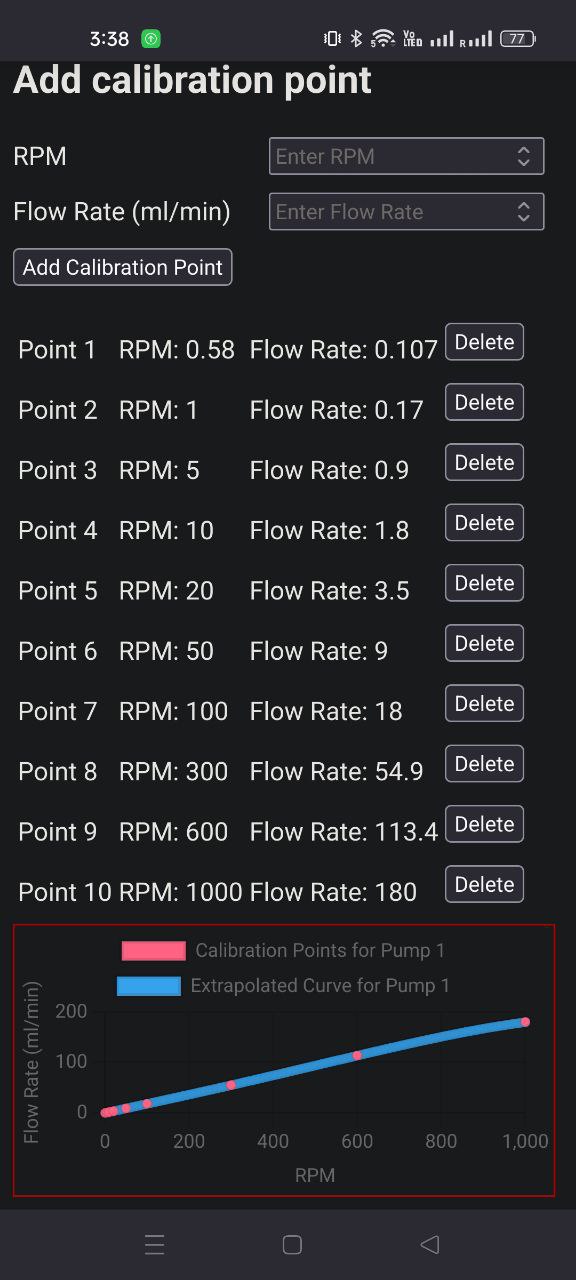
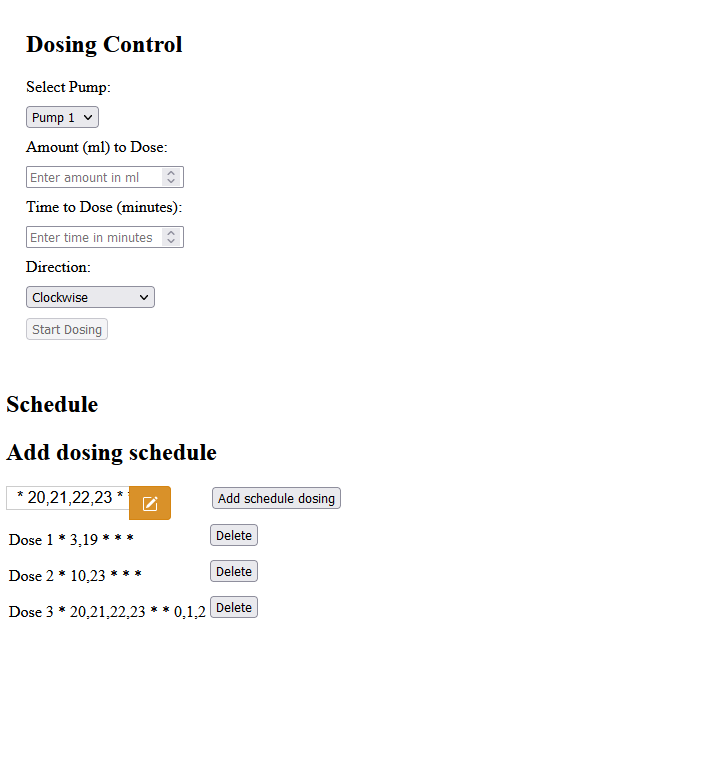
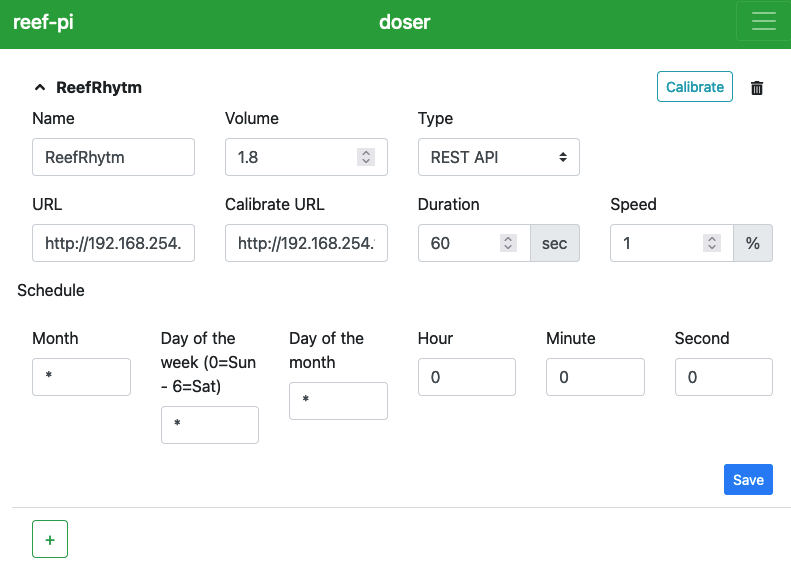
3)Web интерфейс для управления и OTA обновлений прошивки
4)RES API для интеграции
5)Бесшумная работа моторов
6)Поддержка до 9 помп на одном контроллере.
Железо:
1)ESP32-S3 N16R8 контроллер с 16MB Flash и 8MB RAM - 5$

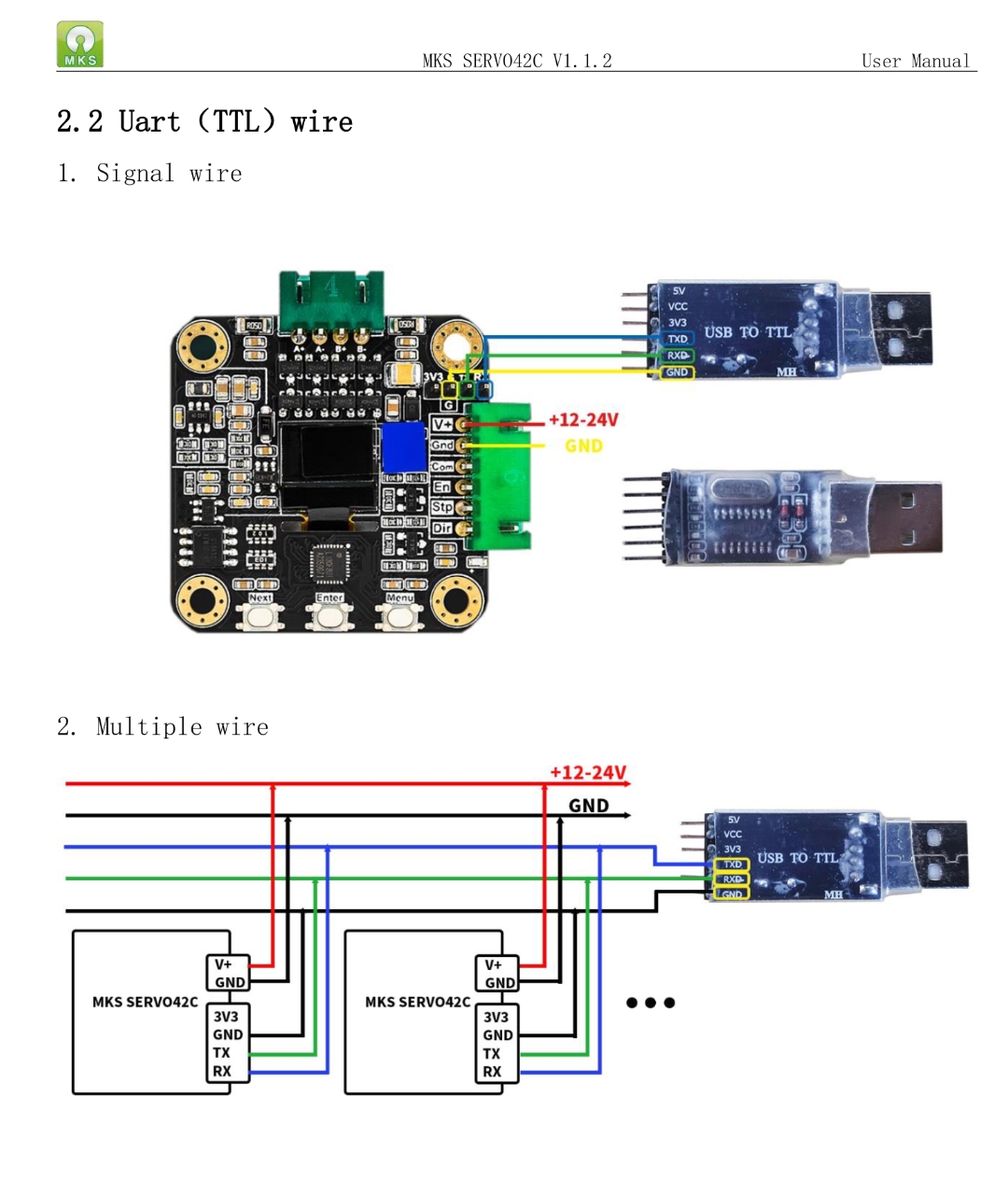
2)BIGTREETECH MKS-Servo42C драйверы шаговых моторов -10$

3)Блок питания достаточной мощности для шаговых моторов. Рекомендую 12V от 2A - 5$
4)Небольшо DC-DC преобразователь на 3.3V для питания ESP32 - 1$

При использовании корпуса для 3D печати из проекта дополнительно:
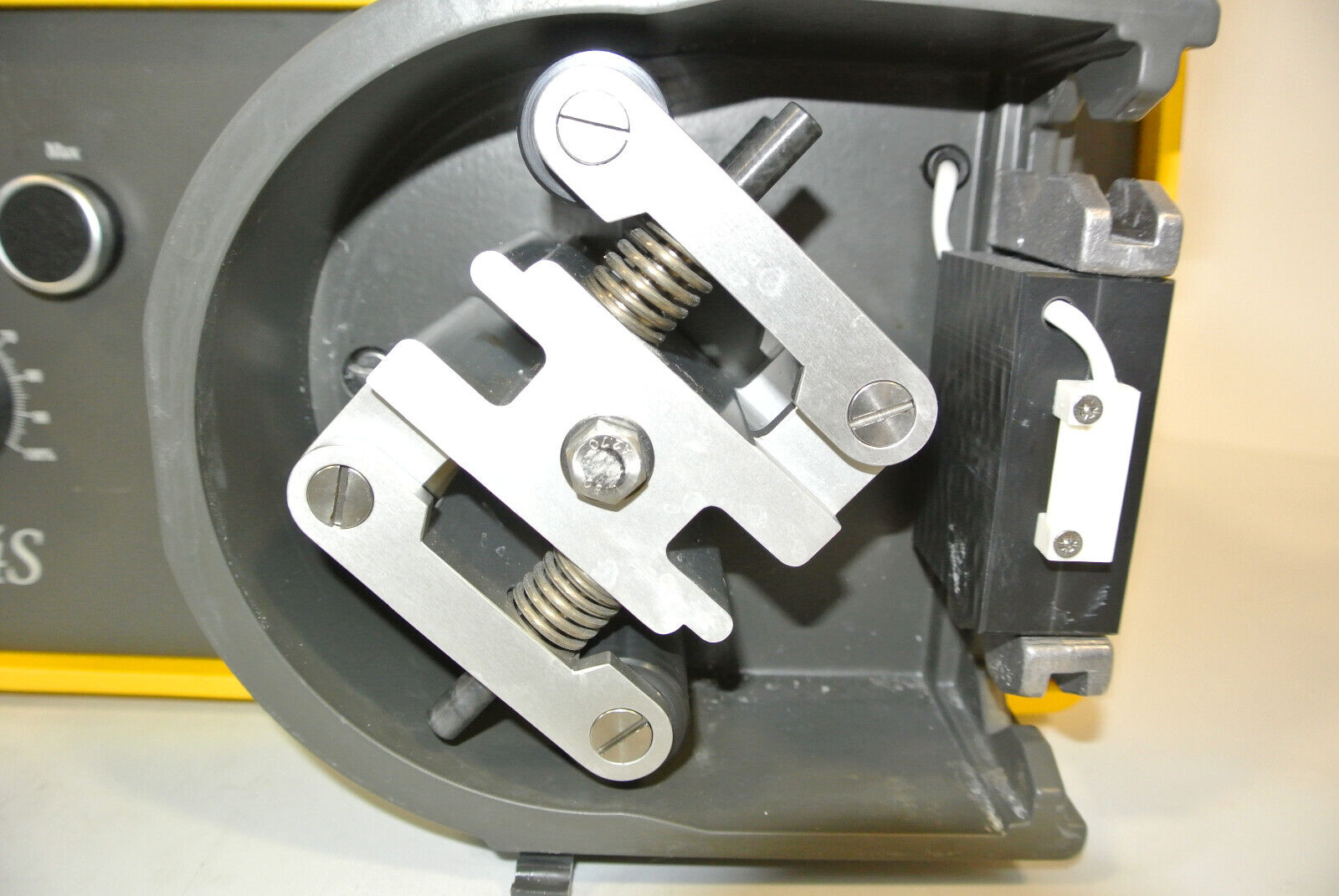
1)Nema42 перильстатическая помпа. Peristaltic Pump 42 Stepper Motor -30$

2)Резьбовые вставки для 3d печатной резьбы 2M, 3мм глубиной и 3.2мм в диаметры

3)Небольшой радиатор 40x40mm. Большой выбор которых можно найти по "Nema17 heatsink"

4)Винты 2M 5mm
3)Провод DC питания с гнездом 5.5x2.5мм
P.S Без прав модератора я не смогу держать стартовое сообщение актуальным, потому в первую очередь смотрим апдейты на github